import syssys.path.insert(1, '..')import matplotlib.pyplot as pltimport seaborn as snsimport pandas as pdimport geopandas as gpdfrom pathlib import Pathimport osimport numpy as npimport rasterio as rioimport rasterio.plot as rio_plotfrom shapely.geometry import Point, Polygonimport shapelyfrom pycocotools.coco import COCOfrom pycocotools.cocoeval import COCOevalfrom ultralytics.utils.metrics import DetMetricsimport fionaimport matplotlib.patches as mpatchesimport warningswarnings.filterwarnings("ignore")from matplotlib.lines import Line2Dfrom src.colors import*tp_leg = mpatches.Patch(color=colors9[1], label='True positives')fp_leg = mpatches.Patch(color=colors9[5], label='False positives')fn_leg = mpatches.Patch(color=colors9[4], label='False negatives')lhandles = [tp_leg, fp_leg, fn_leg]model_path = Path('../runs/yolov8m_Adam/fold_4')image_path = Path('../data/rgb_mosaics/')result_dir = Path('../results_l1c/yolov8m_Adam/fold_4')shp_path = Path('../dataset')
Code
def get_tp_fp_fn(pred_gdf:gpd.GeoDataFrame, gt_gdf:gpd.GeoDataFrame, iou_threshold:float, area_limit:gpd.GeoDataFrame=None) ->tuple[gpd.GeoDataFrame, gpd.GeoDataFrame, gpd.GeoDataFrame]:""" Derive true positives, false positives and false negatives Args: pred_gdf (geopandas.GeoDataFrame): Dataframe containing polygon predictions gt_gdf (geopandas.GeoDataFrame): Dataframe containing ground truth polygons iou_threshold (float): The intersection-over-union threshold to use for matching polygons. Returns: tuple: (tp, fp, fn) geodataframes containing the true positives, false positives and false negatives """# Copy the dataframes to avoid modifying the originals pred_gdf_copy = pred_gdf.copy() gt_gdf_copy = gt_gdf.copy()if area_limit: # Clip to only contain some subarea pred_gdf_copy = pred_gdf_copy.clip(area_limit) gt_gdf_copy = gt_gdf_copy.clip(area_limit)# Count the number of true positives, false positives, and false negatives true_positives =0 false_positives =0 false_negatives =0 tp_ixs = [] fp_ixs = []for index, pred_row in pred_gdf_copy.iterrows():# Find the ground truth polygons that overlap with the prediction overlapping_gts = gt_gdf_copy[gt_gdf_copy.geometry.intersects(pred_row.geometry)]if overlapping_gts.empty: false_positives +=1 fp_ixs.append(index)else:# Compute IoU between the prediction and overlapping ground truth polygons ious = overlapping_gts.geometry.intersection(pred_row.geometry).area / overlapping_gts.geometry.union(pred_row.geometry).area# Find the maximum IoU and corresponding index max_iou = np.max(ious.values) max_iou_index = np.argmax(ious.values)# If the maximum IoU is greater than the threshold, it's a true positiveif max_iou >= iou_threshold: true_positives +=1 tp_ixs.append(index)# Remove the matched ground truth polygon to avoid double counting gt_gdf_copy.drop(overlapping_gts.index[max_iou_index], inplace=True)else: false_positives +=1 fp_ixs.append(index)# Any remaining ground truth polygons are false negatives false_negatives = gt_gdf_copy# Compute precision and recallreturn pred_gdf.iloc[tp_ixs], pred_gdf.iloc[fp_ixs], false_negativesdef evaluate( ground_truth_path:Path, # Path containing the ground truth geopackages result_dir:Path, # Path which contains the results tile:str=None, # Optional tile_id to evaluate only layer:str=None# Optional layer to evaluate only) ->dict:"Evaluate detection results based on ground truth and corresponding results and return result dict." yolo_aps = [[],[],[],[],[],[],[],[],[],[]] yolo_precs = [[],[],[],[],[],[],[],[],[],[]] yolo_recs = [[],[],[],[],[],[],[],[],[],[]] ious = np.linspace(0.5, 0.95, 10)if tile isNone: tiles = os.listdir(result_dir)else: tiles = [tile]for ix, i inenumerate(ious): tps_df =None fps_df =None tot_tp =0 tot_fp =0 tot_fn =0 detmetrics = DetMetrics(names={1:'boat'})for t in tiles:if layer isNone: tsteps = fiona.listlayers(ground_truth_path/f'{t.split(".")[0]}.gpkg')else: tsteps = [layer]for tstep in tsteps: targs = gpd.read_file(ground_truth_path/f'{t}.gpkg', layer=tstep) preds = gpd.read_file(result_dir/t/f'{tstep}.geojson') tp, fp, fn = get_tp_fp_fn(preds, targs, i)if tps_df isNone: tps_df = tpelse: tps_df = pd.concat((tps_df, tp))if fps_df isNone: fps_df = fpelse: fps_df = pd.concat((fps_df, fp)) tot_tp +=len(tp) tot_fp +=len(fp) tot_fn +=len(fn) tp_ixs = np.ones((len(tps_df), 1)) fp_ixs = np.zeros((len(fps_df),1)) tps_for_yolo = np.concatenate((fp_ixs, tp_ixs)) confs_for_yolo = np.concatenate((fps_df.score, tps_df.score)) target_classes = np.ones_like(tps_for_yolo)[:,0] pred_classes = np.ones_like(tps_for_yolo)[:,0] detmetrics.process(tps_for_yolo, confs_for_yolo, target_classes, pred_classes) yolo_aps[ix] = detmetrics.box.ap[0] yolo_precs[ix] = tot_tp / (tot_tp + tot_fp) yolo_recs[ix] = tot_tp / (tot_tp + tot_fn) outdict = {'precision': yolo_precs[0],'recall': yolo_recs[0],'mAP50': yolo_aps[0],'mAP50-95': np.mean(yolo_aps) }return outdict
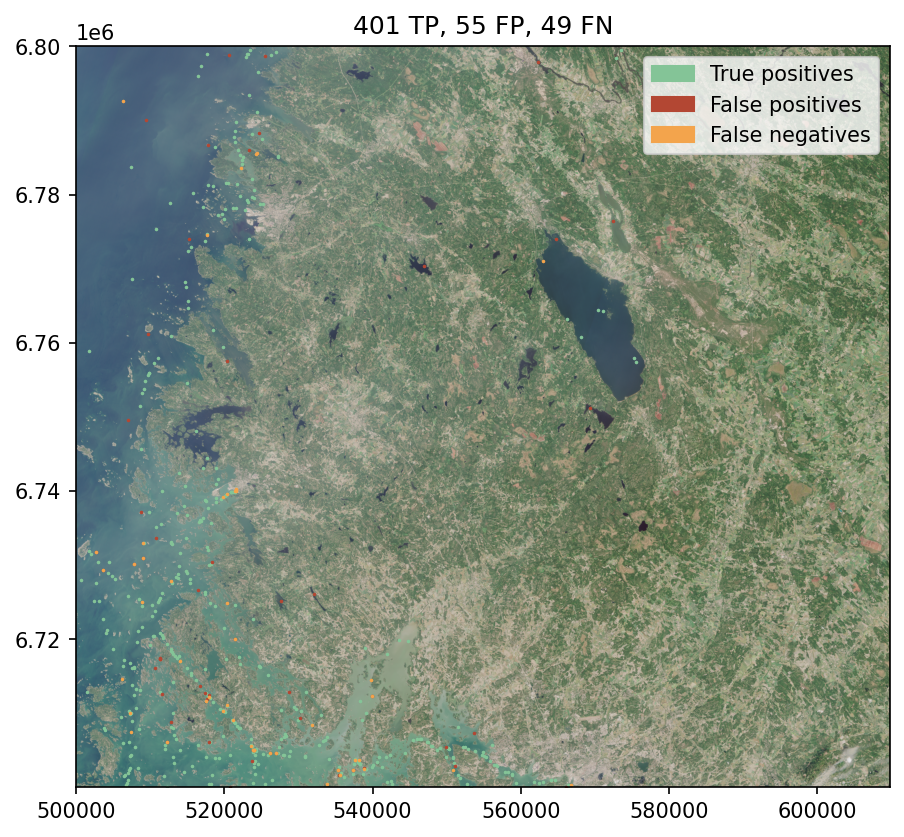
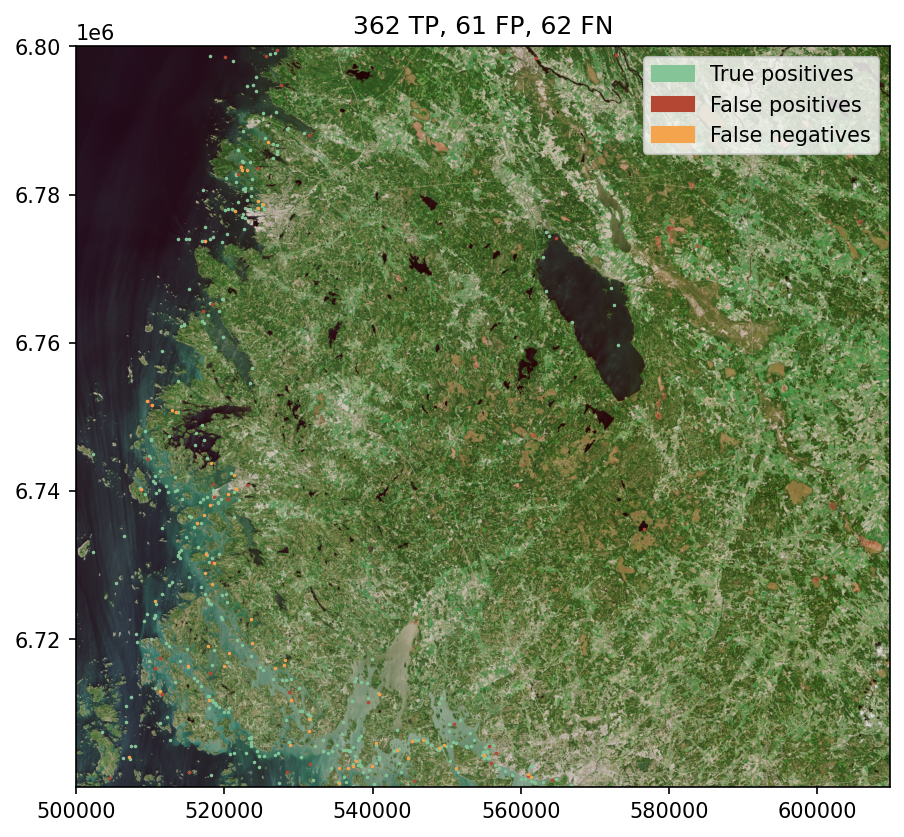
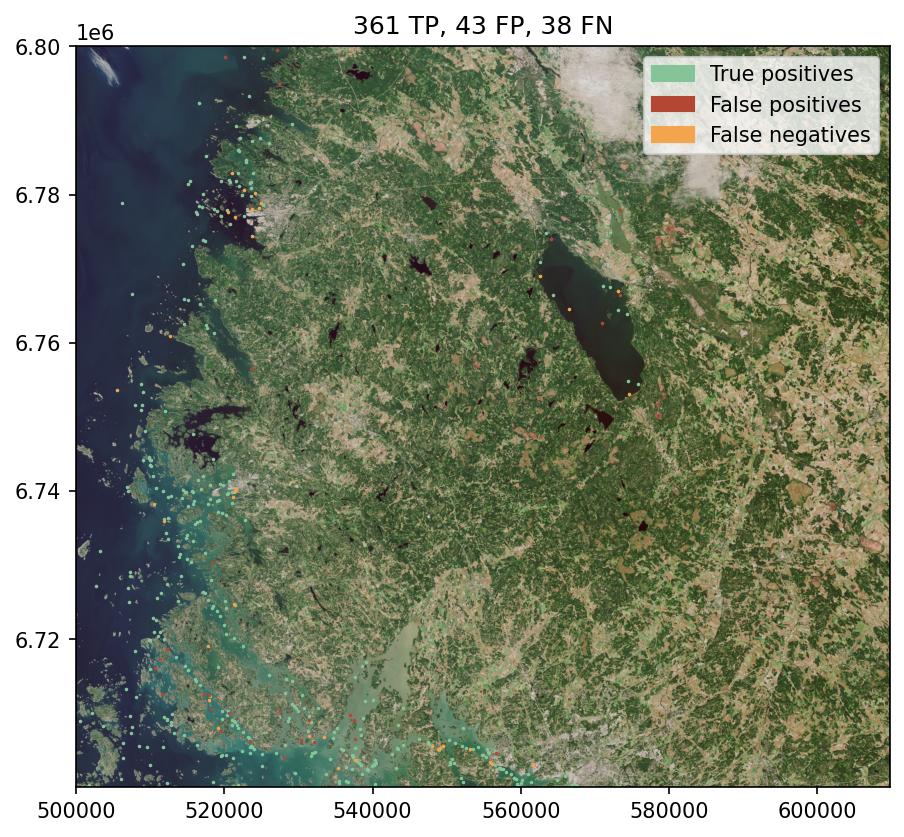
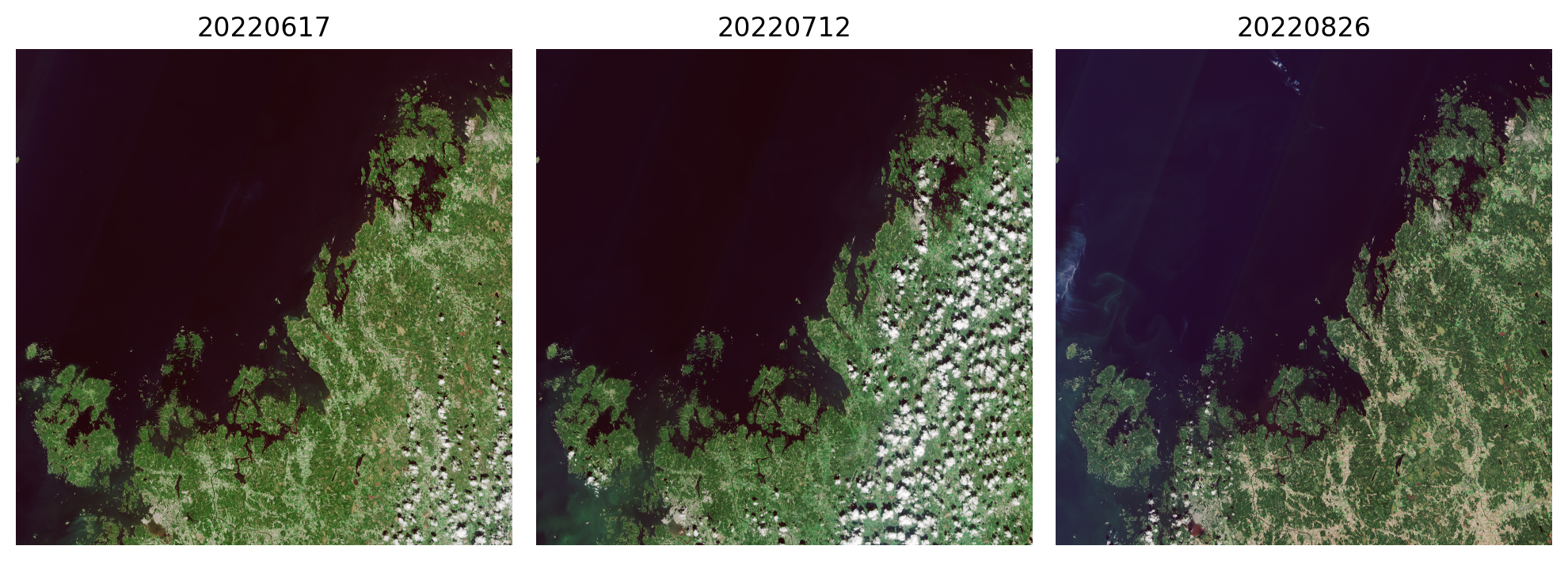
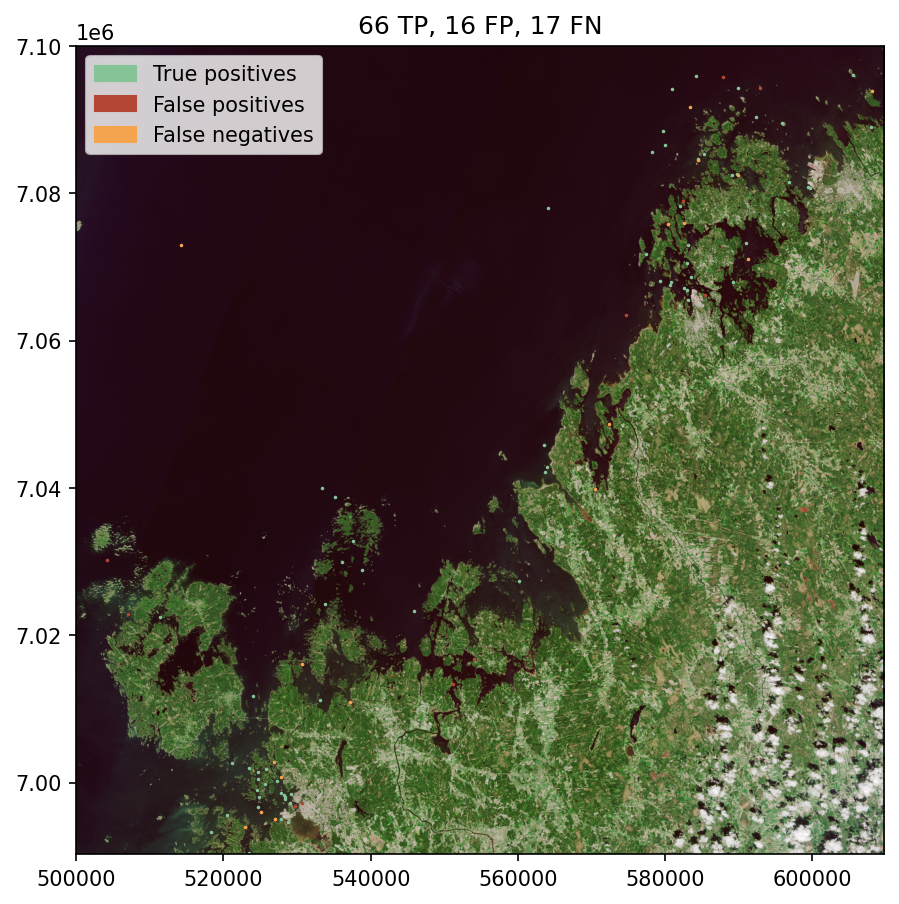
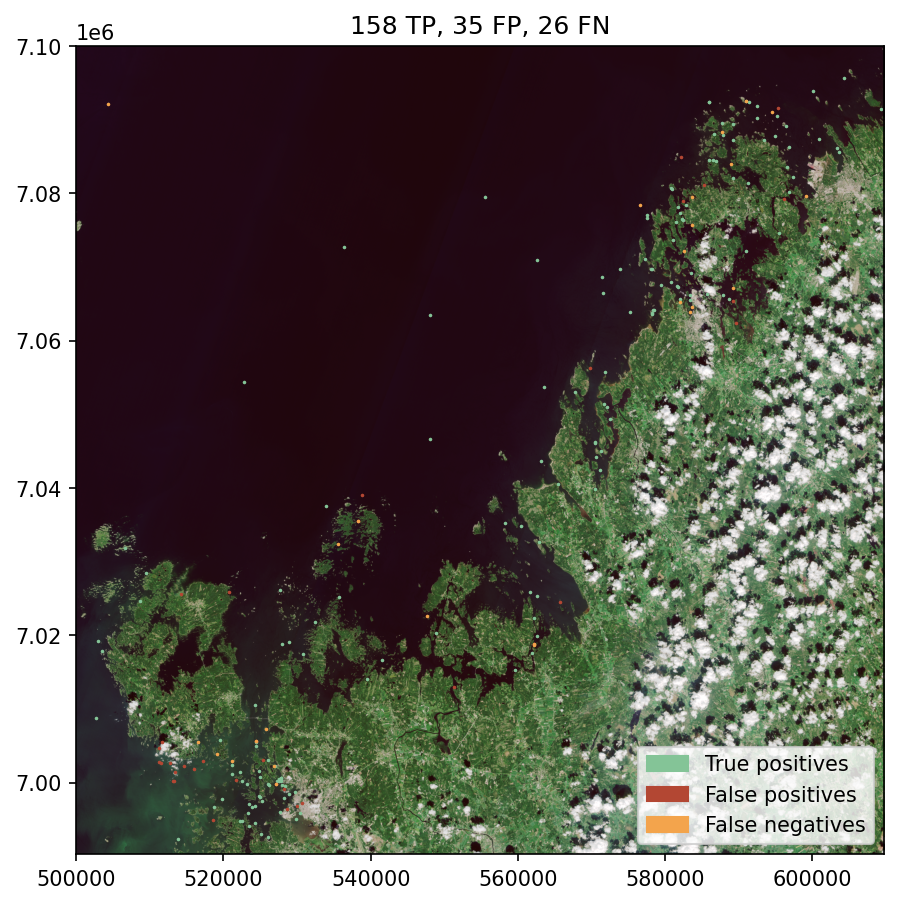
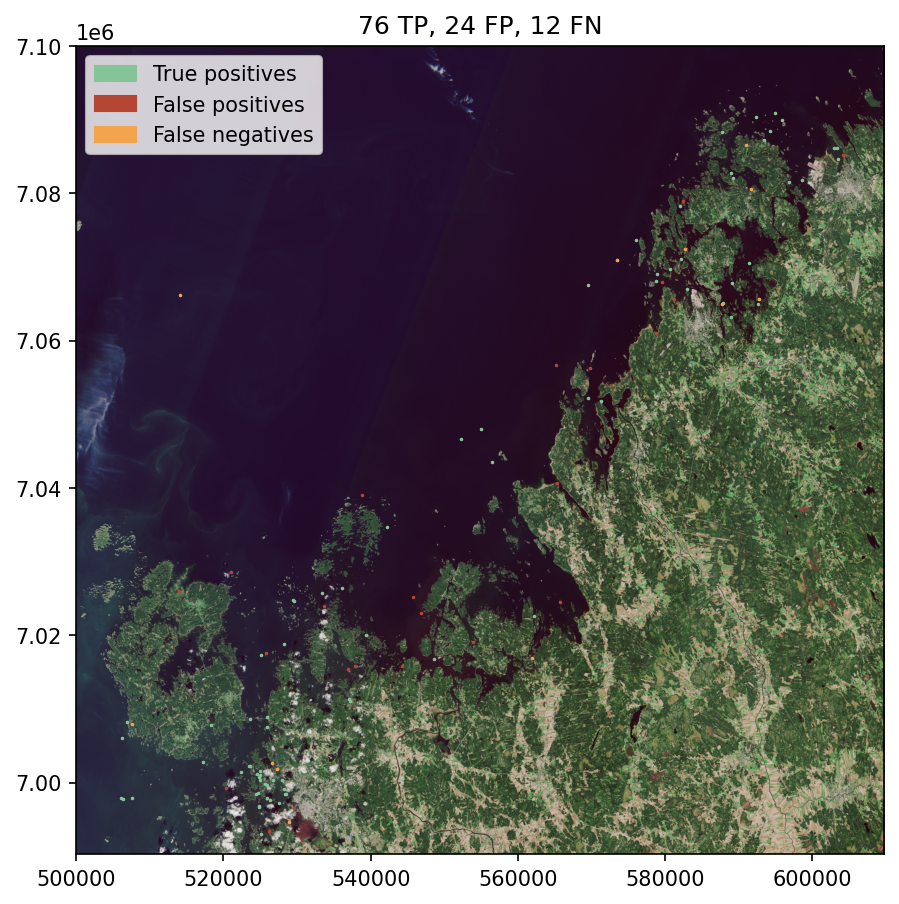
Compare the results for individual products acquired with the best individual model, YOLOv8m_fold4. True positives are defined based on IoU of predicted polygons using shapely.